Copyright 2012-2021 今日看点 All rights reserved. 苏ICP备13052634号-10
声明: 本站部分内容来源网络,如果你是该内容的作者,并且不希望本站发布你的内容,请与我们联系

我们将在24小时内删除
友情链接: 网站地图
匿名团队针对TI芯片的强烈学习需求,推出了匿名拓空者PRO飞控的TI版。使用TI公司的 TM4C123G 主控芯片,打造了一款完全开源的飞控产品,提供完全开源的飞控整体工程文件,没有汇编,没有不开源的lib库,玩家拿到源码后直接编译下载即可。飞控预留多个拓展接口(串 口,可以外接多种串口设备,例如GPS、光流、超声波、wifi,甚至是树莓派、X86等等)。使用匿名完善的强大的软硬件平台进行学习和二次开发,可以起到事半功倍的效果。目前匿名独家开源代码已经实现效果良好的姿态自稳效果,并且已经开源气压计定高、光流定点、GPS定点、返航代码,特别是开源了 一键控制飞行 的源码,买家在此基础上只要加入外部控制环,即可扩展定点悬停、航线飞行等等功能。
 注意
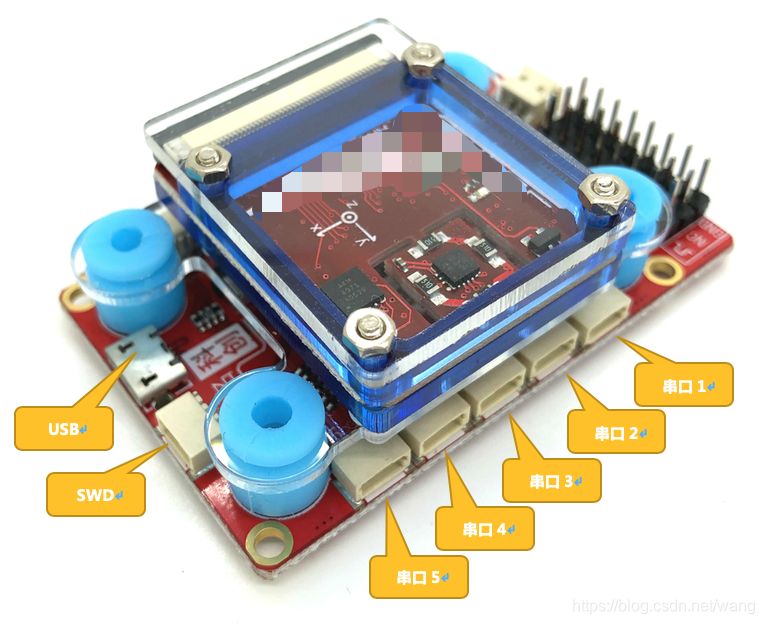
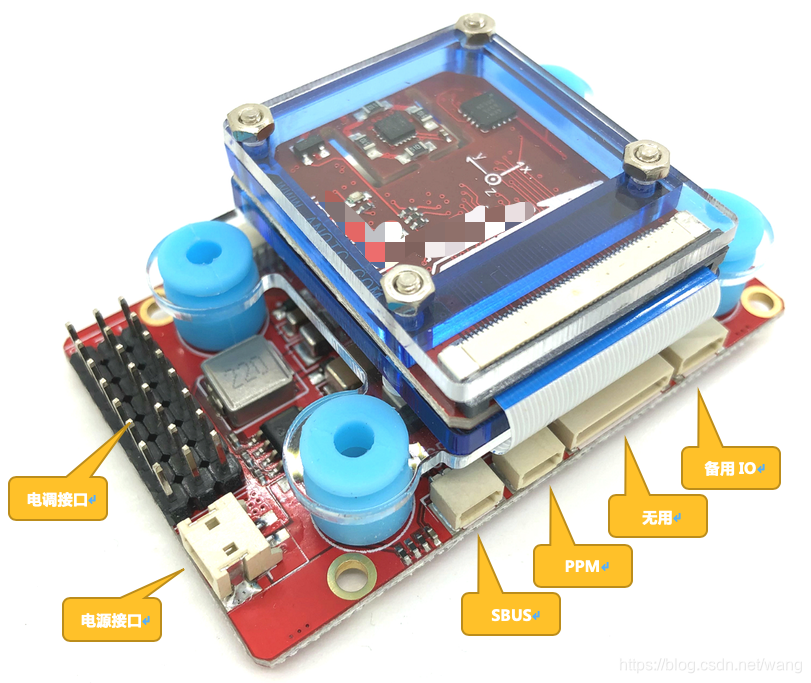
串口为4p,如图,丝印为VGTR,从左至右,分别为VCC(5V)、GND、TX、RX,注意,VCC引脚为靠近电调接口一侧。SWD接口,如图,丝印为DGCN,分别为DIO、GND、CLK、无用IO,也就是说,SWD只能下载用,不能为飞控供电哦,所以在下载时飞控需独立供电。SBUS接收机接口:丝印为GVS,分别是GND、VCC、信号。PPM接收机接口:丝印为GVS,分别是GND、VCC、信号。备用IO接口:本接口设计给用户自定义使用,对应关系请看飞控原理图。电调接口:丝印为GND的一排接电调地,中间丝印为NC的一排接接收机的VCC,某些多旋翼专用接收机没有中间这根线,即可不解,即使连接至电调的VCC,飞控也不从电调取电,飞控使用独立电源。电源接口:丝印VG,分别为VCC、GND,本电源接口支持3S到6S航模电池。360版飞控底板定义与兼容版一致,这里不再重复介绍。匿名坐标系
载体:机头为x正,左侧为y正,z方向满足笛卡尔直角坐标。地理:北为x正,西为y正,天为z正。注意:约定地理坐标约等于世界坐标,该坐标系为匿名科创拓空者飞控参考坐标系,程序里所涉及的所有直角坐标系定义均为此坐标系,欧拉角的定义除外。
注意
串口为4p,如图,丝印为VGTR,从左至右,分别为VCC(5V)、GND、TX、RX,注意,VCC引脚为靠近电调接口一侧。SWD接口,如图,丝印为DGCN,分别为DIO、GND、CLK、无用IO,也就是说,SWD只能下载用,不能为飞控供电哦,所以在下载时飞控需独立供电。SBUS接收机接口:丝印为GVS,分别是GND、VCC、信号。PPM接收机接口:丝印为GVS,分别是GND、VCC、信号。备用IO接口:本接口设计给用户自定义使用,对应关系请看飞控原理图。电调接口:丝印为GND的一排接电调地,中间丝印为NC的一排接接收机的VCC,某些多旋翼专用接收机没有中间这根线,即可不解,即使连接至电调的VCC,飞控也不从电调取电,飞控使用独立电源。电源接口:丝印VG,分别为VCC、GND,本电源接口支持3S到6S航模电池。360版飞控底板定义与兼容版一致,这里不再重复介绍。匿名坐标系
载体:机头为x正,左侧为y正,z方向满足笛卡尔直角坐标。地理:北为x正,西为y正,天为z正。注意:约定地理坐标约等于世界坐标,该坐标系为匿名科创拓空者飞控参考坐标系,程序里所涉及的所有直角坐标系定义均为此坐标系,欧拉角的定义除外。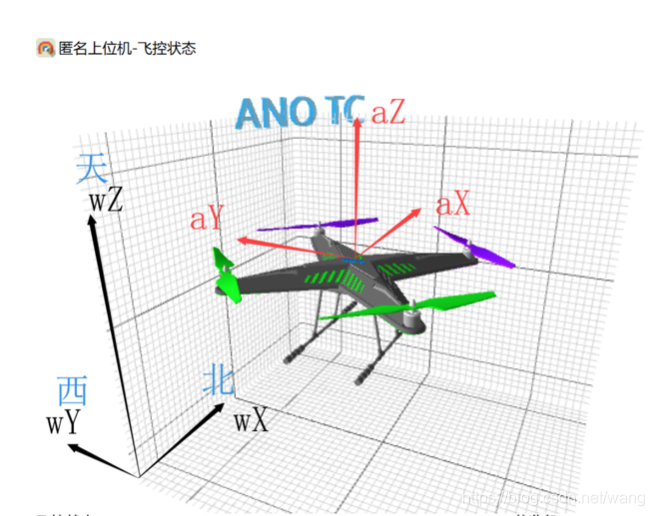
本节按照以下顺序介绍匿名拓空者Pro飞控的使用方法,请用户务必按顺序进行,特别是飞控新手,仔细阅读本节可以帮您解决很多使用中可能遇到的问题。
1、 飞控连接电脑地面站
2、 飞控基本传感器测试
3、 飞控安装
4、 飞控参数配置
5、 飞控连接接收机
6、 飞控解锁方法
7、 飞控连接电调方法及电机检查
8、 起飞前重要工作
9、 飞控基本操作方法
10、 飞控源码下载介绍
飞控可以通过底板上的USB端口连接上位机,使用USB线连接飞控和电脑,飞控买家版程序会将USB端口初始化成虚拟串口设备,只要打开匿名上位机,打开程序设置界面,选择串口通信方式,连接飞控对应的虚拟串口,(虚拟串口需要驱动支持,WIN10系统会自动搜索安装虚拟串口驱动,不排除某些电脑驱动无法自动安装,请使用驱动精灵等驱动安装软件自行安装)然后点击上位机左下角的“未连接”按钮打开连接即可。
成功打开连接后,观察上位机主界面的RX计数器,开始增长表示连接成功。
飞控正确连接上位机并打开连接后,可以进行基本的传感器测试。在打开连接后,RX开始增长,此时打开上位机的“飞控状态”功能。找到“传感器数据”栏目,如下图,如果飞控工作正常,用手移动飞控,此时ACC、GYR、MAG、气压高度均应有数据变化,则表示飞控工作正常。此时不用关注3D姿态、姿态角等数据是否正常,因为还没有做传感器校准。
将机架组装好,电机安装于机架上,飞控安装于机架重心位置,飞控红黑电源线连接到飞机电池线,注意黑色为负极,红色为正极。匿名飞控电源接口可以承受10到25V的电压,并可实现电压监测、报警功能。(注意,飞控尽量水平安装于机架上,飞行效果最好,避光、密封、安装于减震海绵、减震架均可提升飞行以及定高稳定性)
在飞控已正确连接上位机并打开连接的情况下,打开上位机的“文本信息”和“飞控设置”功能,打开参数设置界面,点击下方的读取飞控按钮,正确读取后,文本信息界面会提示参数读取成功。此时,需要根据您的接收机类型,将接收机模式设置为SBUS或PPM模式。报警电压、返航电压、降落电压根据您使用的电池型号进行更改,默认的电压为3S电池的推荐电压,若您使用4S或者6S等其他型号的电池,请根据实际情况进行相关配置。
推荐报警电压:单节3.7V(对应3S电池11.1V)推荐返航电压:单节3.6V(目前未使用)推荐降落电压:单节3.5V(低于此电压,飞行器自动降落)其他参数不要进行改动,保持默认值。(若您更改其他参数后,发生异常,点击右下角恢复默认参数按钮,然后再点击读取飞控,所有参数会恢复至出厂默认值)
接收机连接时,请先用USB连接上位机,打开飞控状态界面,方便观察接收机通道值,然后再进行接收机的连接。
使用SBUS、PPM模式,只需要接电源和SBUS、PPM信号线至接收机,当按照SBUS、PPM模式连接好接收机后,对THR\ROL\PIT\YAW通道进行微调,保证遥控摇杆在中间位置时,上位机的接收机数据显示在1500。(THR代表油门,YAW代表航向,ROL代表横滚,PIT代表俯仰)
以下以使用最多的美国手方式介绍下通道方向定义:
拓空者Pro飞控的解锁方法
油门摇杆打到右下方(对应通道值THR在1100以下,YAW在1900以上),同时方向摇杆打到左下(对应通道值ROL在1100以下,PIT在1100以下)。(俗称内八字)油门摇杆打到左下方(对应通道值THR在1100以下,YAW在1100以下),同时方向摇杆打到右下(对应通道值ROL在1900以上,PIT在1100以下)。(俗称外八字)拓空者Pro飞控加锁方法:在解锁状态下,进行如上操作(内八或外八),飞控会锁定。
飞控PMU的LED闪烁颜色会指示飞控当前的锁定状态,具体灯光颜色含义请参照本手册的“灯光信息”章节。
进行如下电机转向确认操作时,为了安全,先不要安装螺旋桨,进行测试,所有电机都确认正确后,再安装螺旋桨。
无刷电机动力很足,电机转动时切记做好保护措施,切记!

数字加速度传感器量程很有限,且内置滤波也都是数字滤波(采样,滤波,输出),所以一旦原始采样超量程溢出,将引起输出加速度数据严重偏移。螺旋桨振动传递到飞控主要为纵向振动,若螺旋桨动平衡差,运转起来产生强烈振动,将很容易引起加速度计原始采样超量程,进而影响飞机定高定点稳定性,严重的甚至直接引起飞机高度失控。因为组装的飞机飞控减震能力很有限,我们建议使用动平衡较好的螺旋桨,具体可群中交流,且螺旋桨安装后一定要同心旋转,电机轴不能有撞弯等情况,否则容易引起不良的飞行现象发生。
第1步:加速度计校准本步骤相当关键,直接影响飞行器的飞行效果。飞机进行加速度校准前,一定要保持机身水平,也就是所有螺旋桨中心(电机轴)位置,和水平地面平行,必须放置于静止地面,严禁放在有抖动的物体上进行校准。(如果有条件,尽量用气泡水平仪来验证飞行器、飞控的水平角度,只有当校准时,飞行器4个螺旋桨的平面与水平面平行,并且飞控安装角度与水平面平行,才有最好的飞行效果)
校准方法1:确认机身水平静止后,连接飞控至电脑上位机,点击上位机飞控设置-功能设置界面的加速度计校准按钮,飞控指示灯白色闪烁,直至校准结束。校准方法2:确认机身水平静止后,在飞控加锁状态下,左右摇杆同时打到右下方(THR1900,ROL>1900,PIT标签组:[传感器] [开放源代码] [上位机] [二次开发] [ti公司] [接收灵敏度]
本文来源:https://www.kandian5.com/articles/9051.html
下一篇:做园林怎么能不懂风水规划?_杨公

阴道分泌物,一般指「白带」,正常呈白色或透明。在孕期出现褐色分泌物,一般是由阴道出血、宫腔胚胎异常或是胎盘异常出血等引起,由于分泌物在阴道停留时间长、排出较晚,就会变成褐色。妊娠期一般分为三个阶段,妊...
自古以来,胎梦就被视为预测胎儿性别和未来发展的重要线索。许多准妈妈在怀孕期间会做各种奇特的梦,其中 梦见小鸟、白色羽毛和晨露 等意象尤为常见,且常被民间解读为可能预示生女孩的征兆。这些梦境究竟蕴含着怎...

从古至今,胎梦一直被准父母们视为预测宝宝性别与未来发展的重要线索。本文将深入解析梦见 花卉、水果、水 等常见意象与生女孩之间的神秘联系,为您提供一份详尽的胎梦指南。一、胎梦文化背景与科学认知胎梦,即...

关于生女孩的胎梦,传统解读中往往与 柔和、纯净、优雅的意象 相关联。月亮代表阴柔之美,花朵象征生命的绽放,水元素寓意温柔如水,这些都在文化符号学中与女性特质紧密相连。而现代心理学则认为,这些梦境可能反...

在东亚传统文化中,胎梦一直被视为预测胎儿性别和未来命运的重要征兆。当准妈妈们梦见 皎洁的月亮、晶莹的珍珠或翩翩的蝴蝶时,常常会听到"这可能是怀女孩的征兆"的说法。这些美丽而温柔的梦境意象,为何会与女孩...

在备孕和怀孕期间,许多准父母都会经历各种奇妙的梦境,其中 "梦见蝴蝶" 常被认为与生女孩有关。这种关联不仅存在于中国民间传统中,在世界各地的文化里也有着丰富的解读。本文将从 心理学科学视角 和 民间传...

自古以来,胎梦就被视为预测胎儿性别和未来发展的重要征兆。许多准父母在怀孕期间都会经历各种生动奇特的梦境,这些梦境往往被赋予特殊的含义。在传统文化中, 生女孩和生男孩的胎梦有着显著的区别 ,从梦境内容到...

河南有一个孕妈妈怀孕五周去社区医院做阴道B超,确定自己有没有怀孕。当时夫妻俩想到怀孕了都非常关注,所以两夫妻都去医院了。而这个孕妈妈的老公有吸烟的习惯,她就希望能跟医生说一下,让老公戒烟,而且她家里面...

虽然每一包香烟上面都写着‘吸烟有害健康’,但是抽烟的人感受到的是烟可以带给他快乐。比如饭后抽一根烟就感觉自己像是神仙一样;比如说在困的时候抽一根烟能够解乏;比如说在无聊的时候抽...

广东中山一位宝妈面对孩子头朝下摔下床后的做法在短视频平台获得了众多网友的称赞。一是她没有慌乱;二是处理方法十分科学,连不少专家都留言夸赞“妈妈的做法让孩子受到的伤害降到最低”、...

Copyright 2012-2021 今日看点 All rights reserved. 苏ICP备13052634号-10
声明: 本站部分内容来源网络,如果你是该内容的作者,并且不希望本站发布你的内容,请与我们联系
我们将在24小时内删除
友情链接: 网站地图